Introduction Paper: Actor-Critic Algorithms
Authors: Vijay R. Konda John N. Tsitsiklis
Actor Critic
In this post, I will introduce the another policy gradient algorithm: Actor-Critic method. In general, there are two main components in policy gradient: policy model, and value function. Value function can help policy update, e.g., reducing gradient variance in vanilla policy gradients. In particular, we use Critic layer to approximately estimate value function:

To introduce Actor-Critic method, we separate them into two models, which may share parameters optionally:
-
Critic Layer: updates the value function parameters w, it could be actor-value Q or state-value V, depending on the algorithm; -
Actor Layer: updates the policy parameters, in the direction suggested by the critic.
Hence, we may consider Actor-Critic method as approximate policy gradient.

In this post, I introduce a simple action-value actor-critic method procedure:

As mentioned earlier, this algorithm actually uses an approximate policy gradient, which will introduce bias, and lead to fail to converge to a suitable policy. One solution is to design Q-value that Simultaneously satisfies the following two conditions (Compatible Function Approximation Theorem):
-
The gradient of the approximation value function is exactly equivalent to the gradient of the logarithm of the strategy function:

-
The value function parameter w minimizes the mean square error:

Short Proof: If the Q-value satisfies the above two conditions, then we have:

Actor Critic with Baseline
In addition to introducing the Critic layer to reduce the variance, we also consider subtracting a baseline from Q function to reduce the variance. Specifically, we require the baseline function B subtracted from the policy gradient, only to be related to the state, and has nothing to do with the behavior, so that the gradient itself is not changed.
A good choice of B(s) is value function V(s). Hence, we introduce an advantage function A(s, a) with the following definition:

Usually we use TD error to estimate the advantage function, because it is an unbiased estimator of advantage function.

Hence, we have:

Example of Actor Critic Using cartpool From OpenAI Gym
import gym, os
from itertools import count
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from torch.distributions import Categorical
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
env = gym.make("CartPole-v0").unwrapped
state_size = env.observation_space.shape[0]
action_size = env.action_space.n
lr = 0.0001
class Actor(nn.Module):
def __init__(self, state_size, action_size):
super(Actor, self).__init__()
self.state_size = state_size
self.action_size = action_size
self.linear1 = nn.Linear(self.state_size, 128)
self.linear2 = nn.Linear(128, 256)
self.linear3 = nn.Linear(256, self.action_size)
def forward(self, state):
output = F.relu(self.linear1(state))
output = F.relu(self.linear2(output))
output = self.linear3(output)
distribution = Categorical(F.softmax(output, dim=-1))
return distribution
class Critic(nn.Module):
def __init__(self, state_size, action_size):
super(Critic, self).__init__()
self.state_size = state_size
self.action_size = action_size
self.linear1 = nn.Linear(self.state_size, 128)
self.linear2 = nn.Linear(128, 256)
self.linear3 = nn.Linear(256, 1)
def forward(self, state):
output = F.relu(self.linear1(state))
output = F.relu(self.linear2(output))
value = self.linear3(output)
return value
# Plot duration curve:
# From http://pytorch.org/tutorials/intermediate/reinforcement_q_learning.html
episode_durations = []
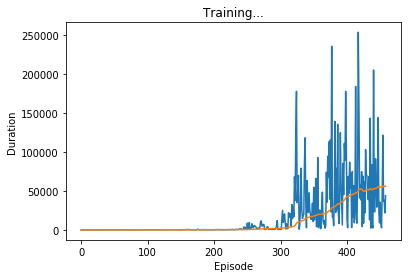
def plot_durations():
plt.figure(2)
plt.clf()
durations_t = torch.FloatTensor(episode_durations)
plt.title('Training...')
plt.xlabel('Episode')
plt.ylabel('Duration')
plt.plot(durations_t.numpy())
# Take 100 episode averages and plot them too
if len(durations_t) >= 100:
means = durations_t.unfold(0, 100, 1).mean(1).view(-1)
means = torch.cat((torch.zeros(99), means))
plt.plot(means.numpy())
plt.pause(0.001) # pause a bit so that plots are updated
def compute_returns(next_value, rewards, masks, gamma=0.99):
R = next_value
returns = []
for step in reversed(range(len(rewards))):
R = rewards[step] + gamma * R * masks[step]
returns.insert(0, R)
return returns
def trainIters(actor, critic, n_iters):
optimizerA = optim.Adam(actor.parameters())
optimizerC = optim.Adam(critic.parameters())
for iter in range(n_iters):
state = env.reset()
log_probs = []
values = []
rewards = []
masks = []
entropy = 0
env.reset()
for i in count():
#env.render()
state = torch.FloatTensor(state).to(device)
dist, value = actor(state), critic(state)
action = dist.sample()
next_state, reward, done, _ = env.step(action.cpu().numpy())
log_prob = dist.log_prob(action).unsqueeze(0)
entropy += dist.entropy().mean()
log_probs.append(log_prob)
values.append(value)
rewards.append(torch.tensor([reward], dtype=torch.float, device=device))
masks.append(torch.tensor([1-done], dtype=torch.float, device=device))
state = next_state
if done:
#print('Iteration: {}, Score: {}'.format(iter, i))
episode_durations.append(i + 1)
plot_durations()
break
next_state = torch.FloatTensor(next_state).to(device)
next_value = critic(next_state)
returns = compute_returns(next_value, rewards, masks)
log_probs = torch.cat(log_probs)
returns = torch.cat(returns).detach()
values = torch.cat(values)
advantage = returns - values
actor_loss = -(log_probs * advantage.detach()).mean()
critic_loss = advantage.pow(2).mean()
optimizerA.zero_grad()
optimizerC.zero_grad()
actor_loss.backward()
critic_loss.backward()
optimizerA.step()
optimizerC.step()
#env.close()
actor = Actor(state_size, action_size).to(device)
critic = Critic(state_size, action_size).to(device)
trainIters(actor, critic, n_iters=500)